Several weeks ago I ordered a new Naza-M V2 for my DJI F550 Flame Wheel multicopter. I originally had the DJI Wookong-M controller but had to sell that. The Naza v2 has all of the stability of that more expensive model and works great. Another feature I wanted to add was a brushless stabilized camera gimbal and to do that I needed to get some landing gear for the Flame Wheel.
Being short on money but having a lot of 3D printer filament and a reasonably working DIY 3D printer I decided to print a set from scratch. I had some spare arrow shafts which I figured I could cut up and use for legs and just connect everything with 3D printed pieces here and there. It turned into a fair amount of work but the results have been pretty satisfying.
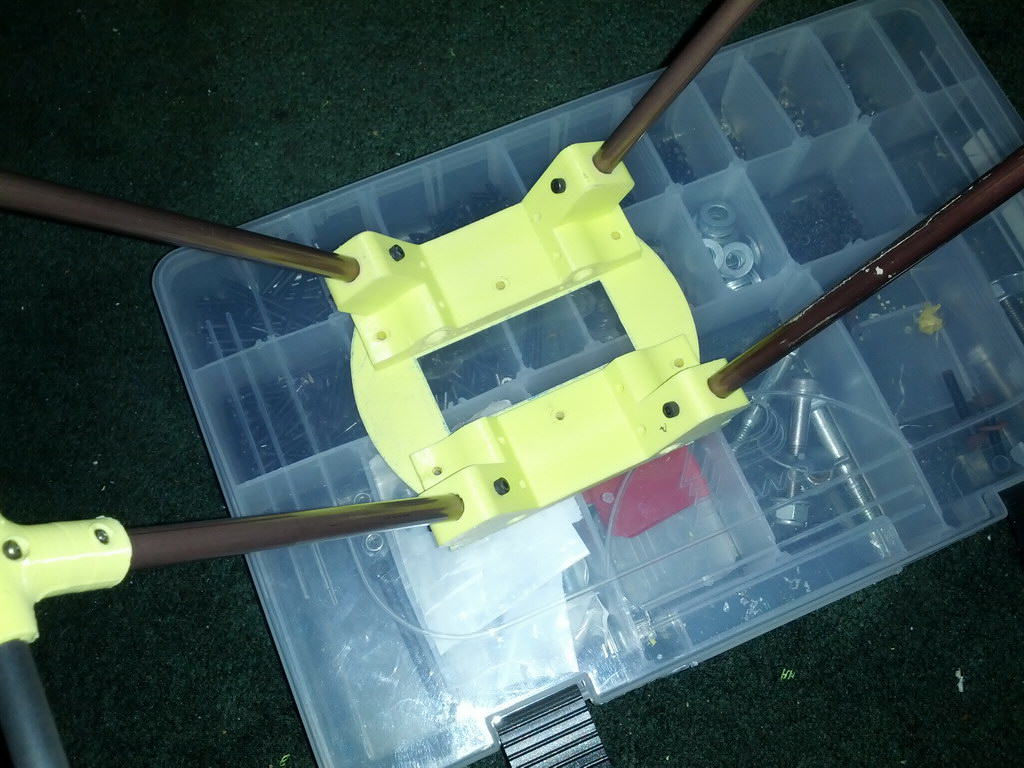
The F550 frame has circular slotted holes for the bottom plate rather than a bolt pattern so I printed a base plate for that which keys into the slots. It came out perfect on the first print and the base plate can rotate about 30 degrees in either direction when the bolts are loose. I melted in a couple of 3M nuts where the bolts didn’t go all the way through the frame.
All of the yellow parts are printed in Ultimachine PLA which is more rigid than ABS.

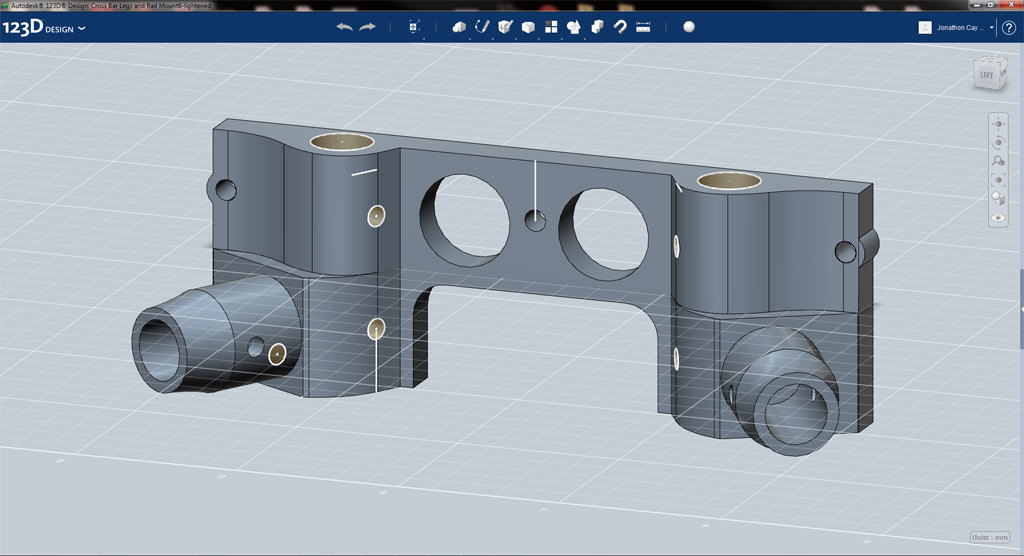
Once I had the base plate I designed and printed the upper mounts for the legs. I did have an idea drawn down on paper but it was pretty simple and as I got drafting things out I changed things completely. I drew them up in Autocad 123d and then printed them out. They came out great and were very strong as well.

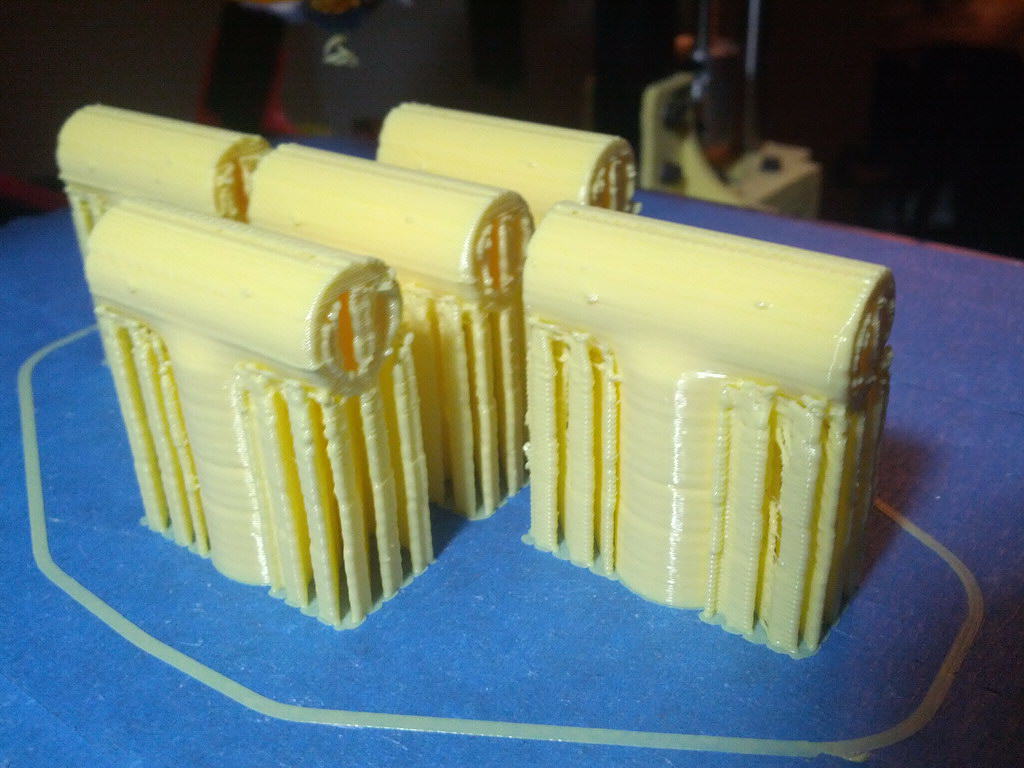
Everything aligned so far and I was feeling pretty good about this project. Sometimes things just seem to flow together. I printed up some T pieces to connect the lower parts of the legs to some carbon arrow shaft I had picked up. 3 arrows for $10 in the sale bin at the local sports store. These T’s came out a little bit messy, I could have printed them right side up. The collar vertical section is a bit thicker. The aluminum I used for the legs was 8.8mm in diameter and the carbon arrow shafts were about 6mm in diameter.
Once I had these installed I installed the landing gear on the multicopter to check things out and it was looking like a pretty nice fit and aside from the color, fit in well with the whole machine.


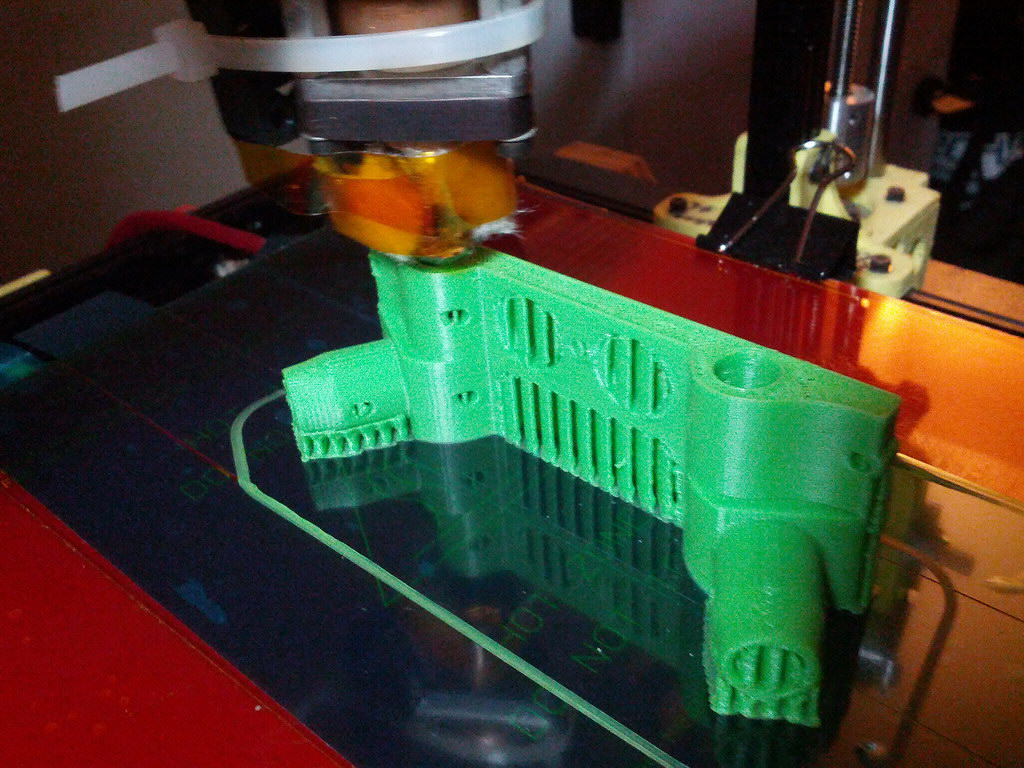
I got to thinking that the upper blocks that the legs connect to might be a little heavy and chunky looking so I decided to replace them with something a little more streamlined, about this time I also ran into the tight coiled spot on the yellow PLA filament so I switched to ABS MakerFarm green. The new design looked great and printed great, unfortunately it was too weak and I was easily able to delaminate it in some of the thin walled spots the leg tubes go into. I ended up using the yellow PLA printed upper blocks.
Now this is where I was originally going to stop and wait for the brushless gimbal stabilizer and brushless gimbal motors to arrive, but a friend called me. He had lost his scratch built ME-109 plane about a month ago in the thick brush at the edge of the r/c flying field and had not been able to find it, he asked if I could give him a hand with the multi-rotor to try and find it.
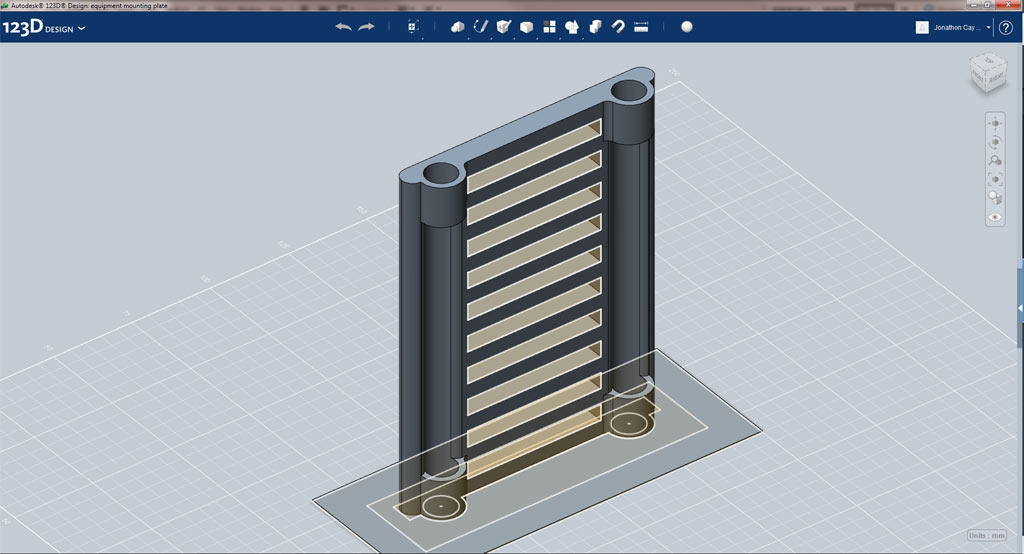
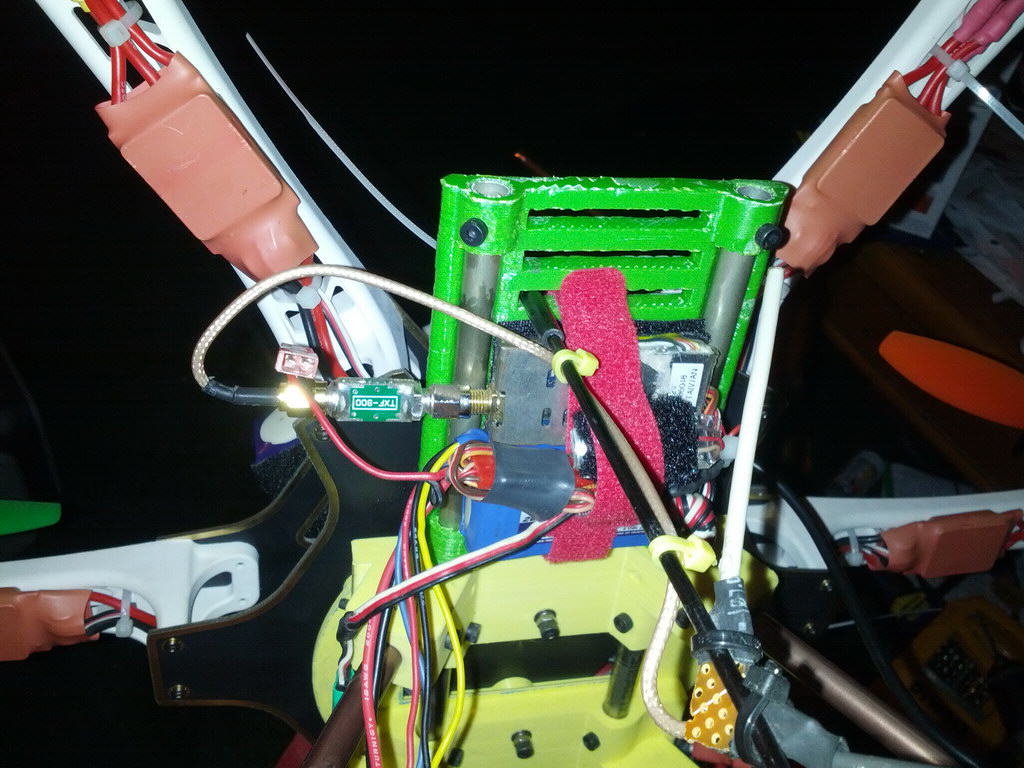
That’s the kind of thing I love! I told him that I would help him towards the weekend and got in gear to make a fixed camera mount. The upper gear blocks have holes in them to run arrow shaft horizontal from the front to the back of the hexacopter and hang equipment off of it, sort of a universal rail system which is pretty common in the commercial offerings of multi-rotor landing gear.
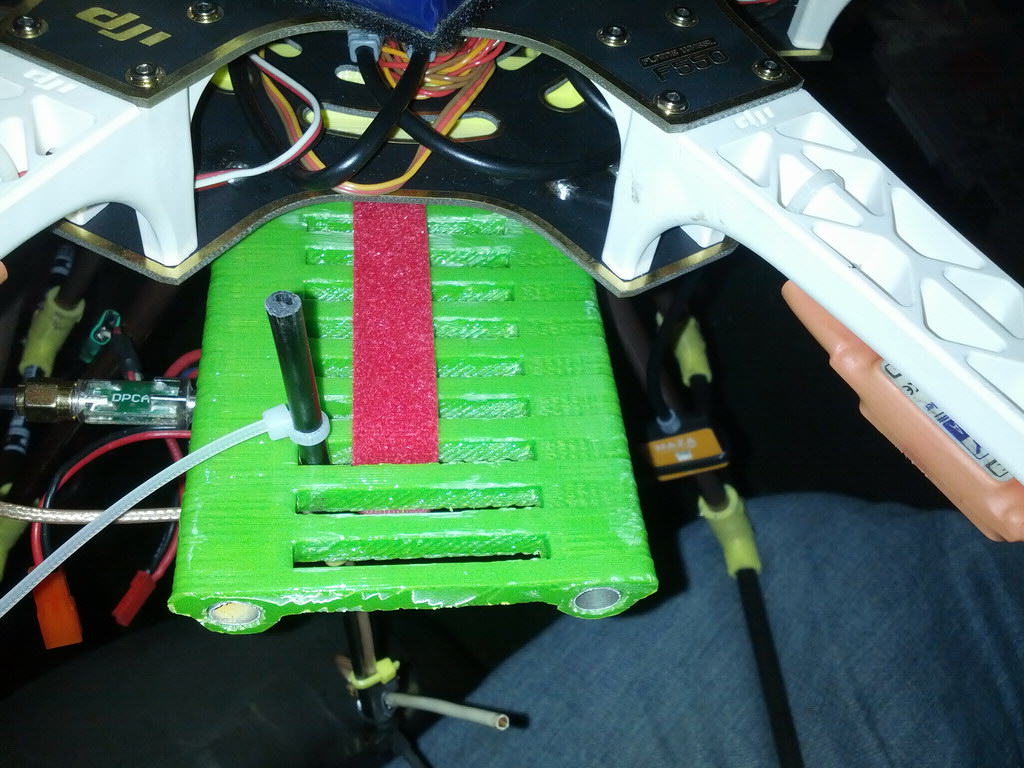
I needed an equipment mount for the video transmitter, transmitter battery and antenna, the antenna mounting is still being worked on. I’ll probably switch to a cloverleaf design and see how that works. Here are a couple of pictures of the equipment mounting plate.
I printed up the first camera mount and accidentally made it too narrow to fit on the rails (the whole measure twice thing got me!) and so once I fixed that I file I reprinted it and mounted the camera. I didn’t get any pictures of that first mount, but it worked okay, unfortunately it was rigidly mounted to the rail and the pictures over the property came out blurred and distorted most of the time, as seen below you can see smudges (click to enlarge).

Although some came out fairly sharp.

Well… we did 3 flights that day over most of the property and could find anything on the ground, I had the GoPro set to snap a photo every 5 seconds while in flight (The original photographs were at 11 megapixel, just downsized for the blog). The owner of the lost plane was wearing the FPV goggles while I flew around and dropped altitude here and there to check out possible sightings. It was a fun search and rescue thing, but with no results.
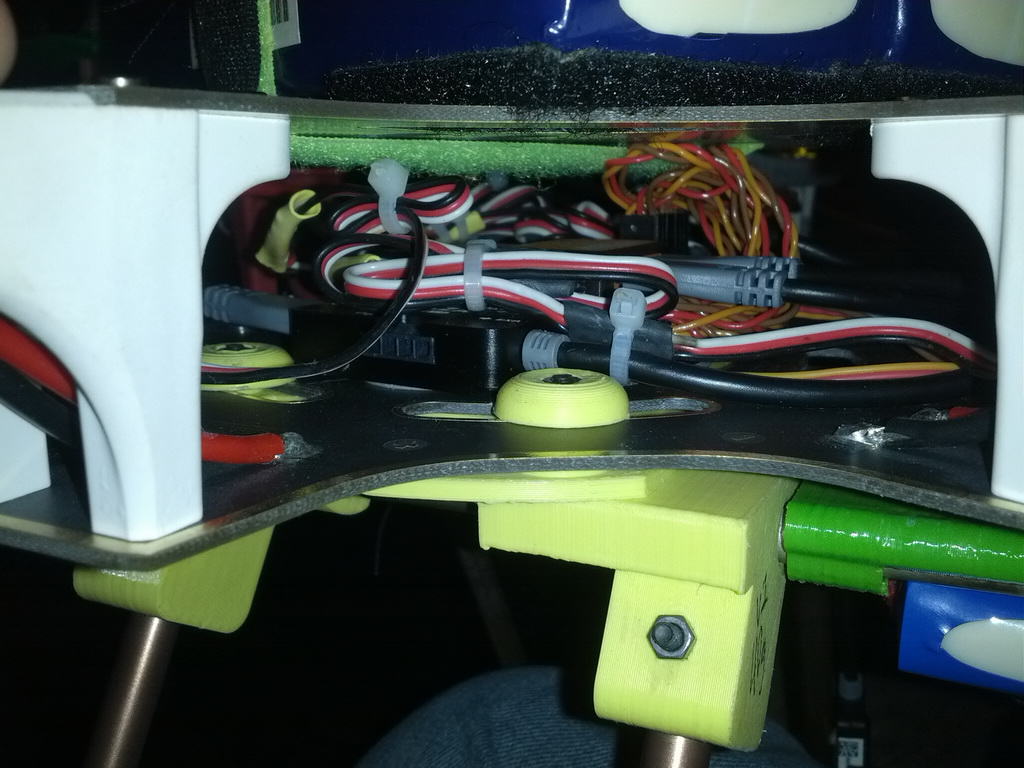
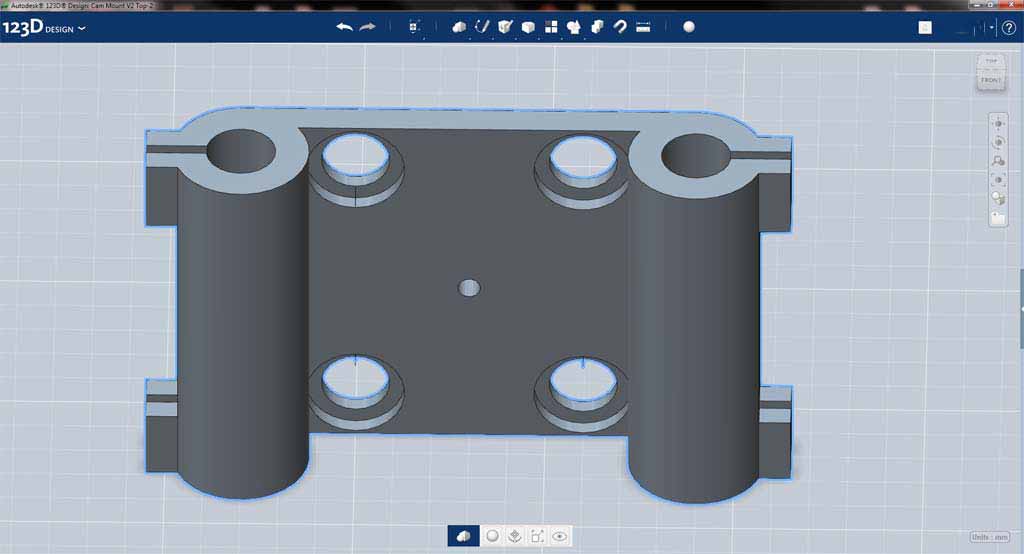
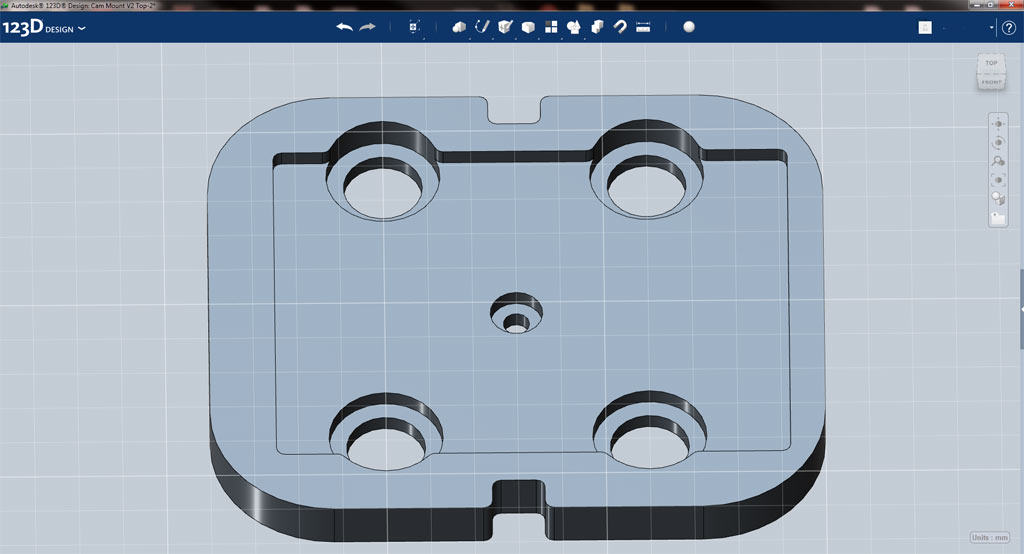
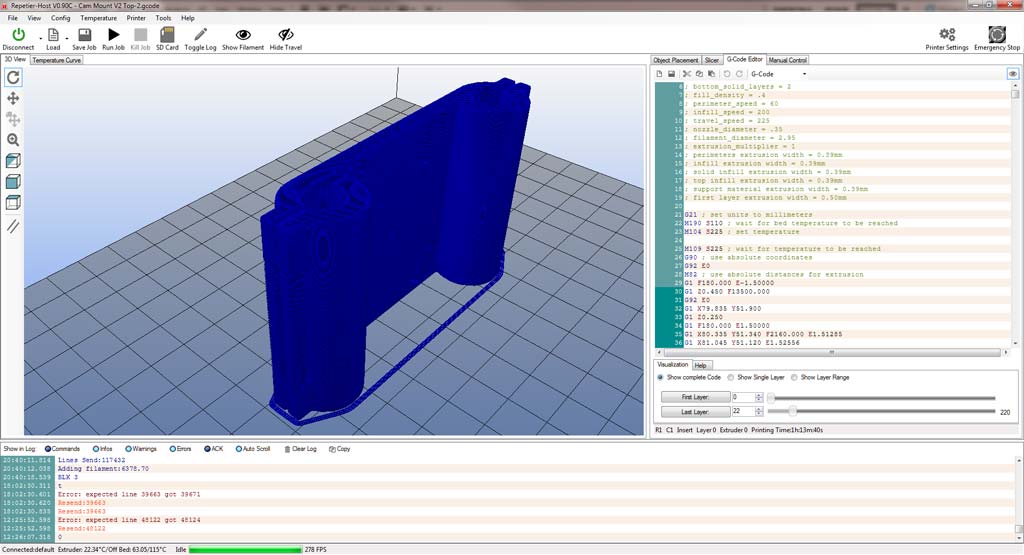
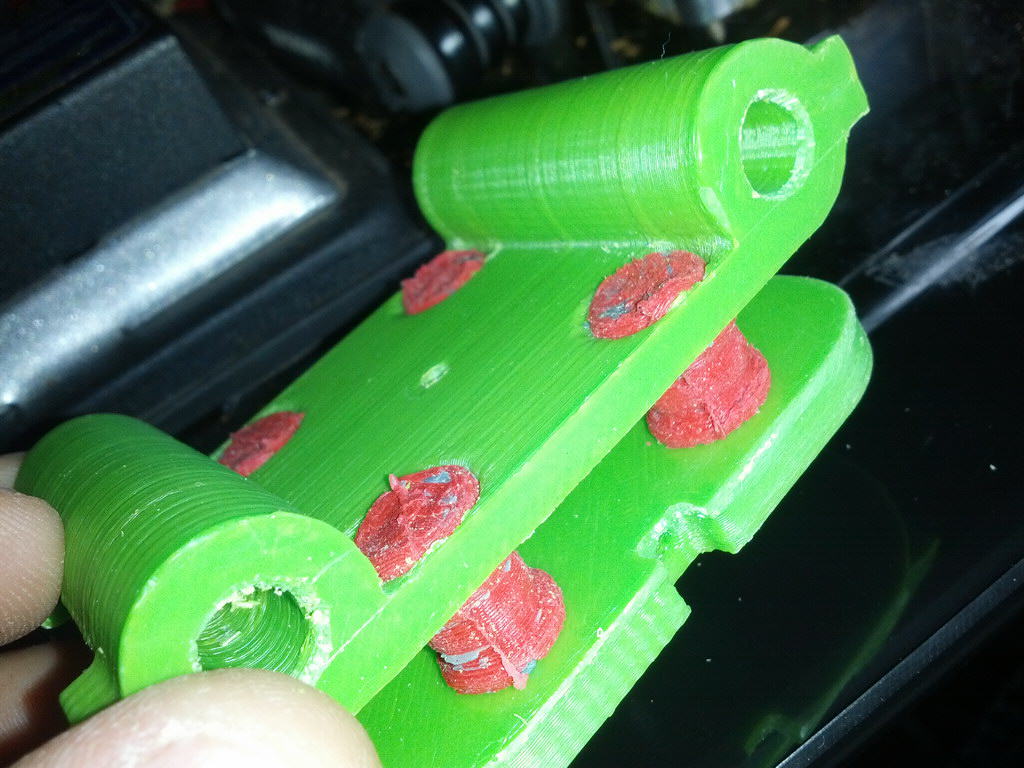
I had been frustrated with the blur lines in the photos and wanted to get rid of some of the vibration. On friday night after our first tests I printed out some silicon molds for rubber dampers and made some dampers with Ooogoo, you can see the photos and info on that on me previous post Casting Silicone in 3D Printed Molds (new window). Once I got the silicone curing figured out I designed a new downward looking camera mount that would fit the silicone dampeners I had made. Here are some pictures of the design of those pieces.
They printed and fit up pretty well, I have no complaints. I did use a retaining wire that connects to the lower mount and goes around the upper mount. I didn’t want to risk the silicone isolators popping out and the camera falling to the ground, but this hasn’t been a problem and has been holding up fine for a couple of flights so far.



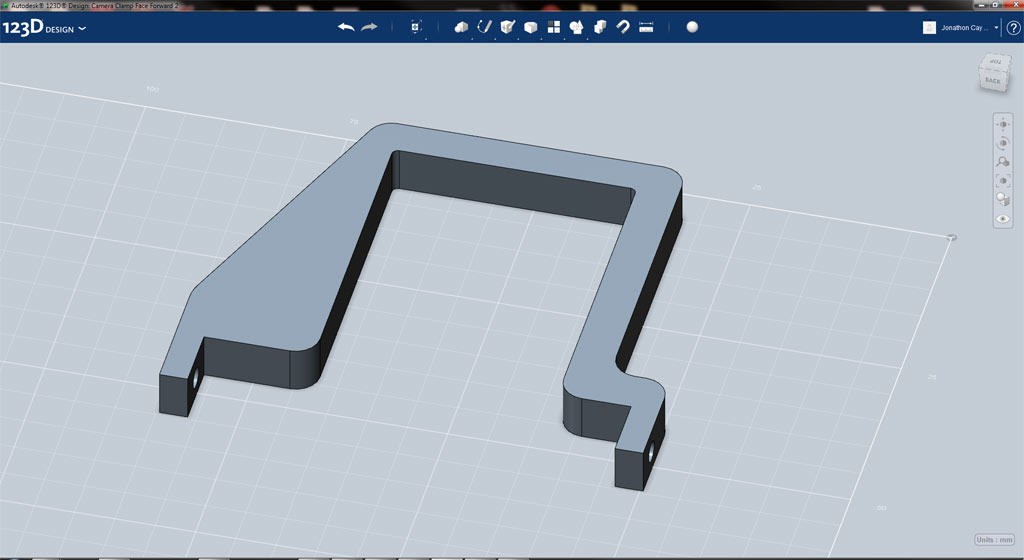
I didn’t actually test it in this exact configuration though. We went back out today with the multicopter and hiked out into the field. We decided to do a little bush whacking in some pockets of bush that we could get into first and then walked along the road, lo and behold I spotted his plane deep in the shrubs and he recovered it. I wanted to do a little FPV flying today as well, so right before I left to the field I made an adapter plate bracket that would hold the camera in a forward looking position. It worked out great.

The camera was nice and rigid to the mount, but the mount had some spring. The true results can be seen in the video below, it’s pretty smooth, but I think there’s a little room for improvement, this whole flight was flown FPV.
In the video below you can see the upper frame of the DJI F550 frame shaking quite a bit in certain flight modes, but the cameras view is much more stable than the legs protruding in the picture. If the isolation was not effective, the camera frame would be moving with the upper frame of the multicopter and you wouldn’t see the legs shaking, you would just see the whole video frame shaking quite a lot.
I was originally not a big fan of 3D printed stuff, it looks ugly/not smooth and I was on my CNC router kick at that time too, which certainly can produce much better finishes, etc. The advantage of the 3D printer is that I can have an idea, draw it out, fire it up on the 3D printer next to my desk and have a model in anywhere from 30 mins to a couple of hours depending on the part. The parts are functional and if you mess something up it’s pretty easy to make some changes and print another one. I certainly see a place for 3D printing in my hobbies for this type of protypical work and rapid prototyping in general. I don’t use it a lot, but every so often a project comes up and it’s running for a week or two at a time.
2 responses to 3D Printed Landing Gear and Camera Mount for my DJI F550
Did you share the files at all? I might like to try your landing gear design out.
Wow. This is what you have been busy at. One of many things and I can say that because I am your mom and I know.
Leave a reply to 3D Printed Landing Gear and Camera Mount for my DJI F550